Un outil à but pédagogique
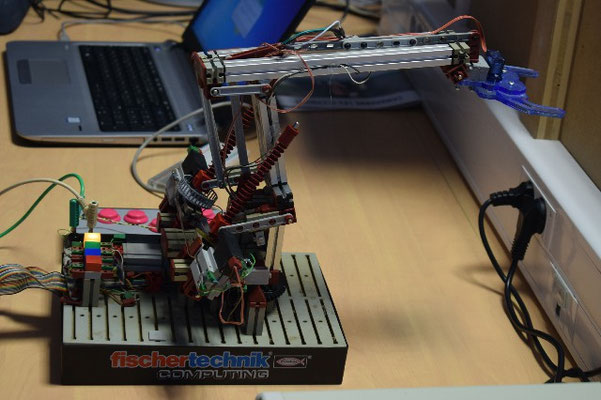
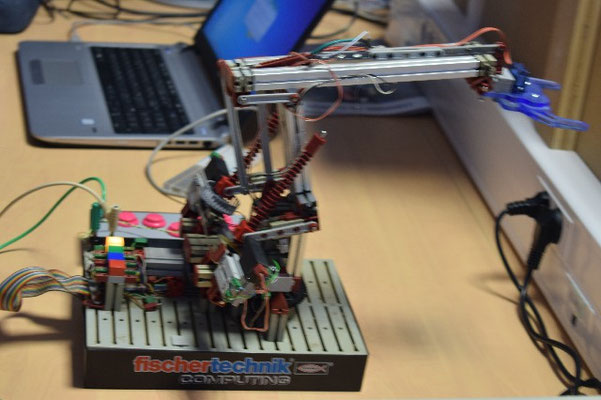
A l'initiative de Pascal, habitué des Openlabs, le projet a consisté à proposer un outil pédagogique pour les stagiaires à partir de la récupération d’un robot obsolète initialement contrôlé par un port parallèle d’ordinateur (port qui servait pour les imprimantes, remplacé aujourd’hui par des câbles usb).
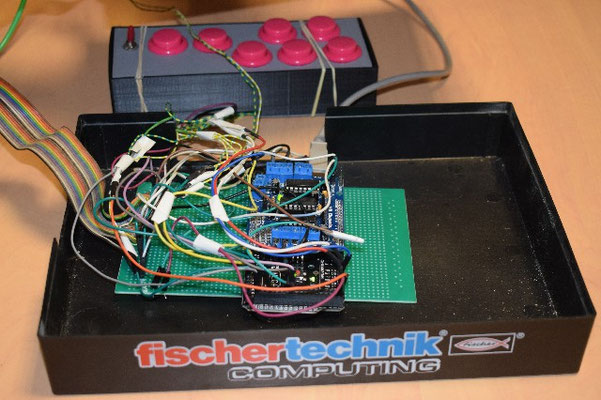
L'idée a été de récupérer ce matériel "au rebut" pour en faire un robot programmé à l'aide d'Arduino Mega équipée d’un shild 292 pour contrôler les 3 moteurs et le servo moteur.
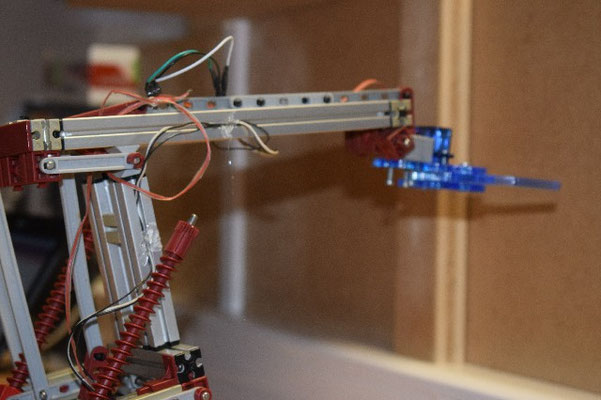
Le robot a 4 degrés de liberté, c’est-à-dire qu'il permet d'actionner la tour, la flèche et le balancier ainsi que la pince. Les 3 premiers sont des moteurs courant continu, le 4ème est un servo moteur, 8 volts.
Ce robot à l'image des robots industriels permet de préhender une pièce pour la déposer ailleurs.
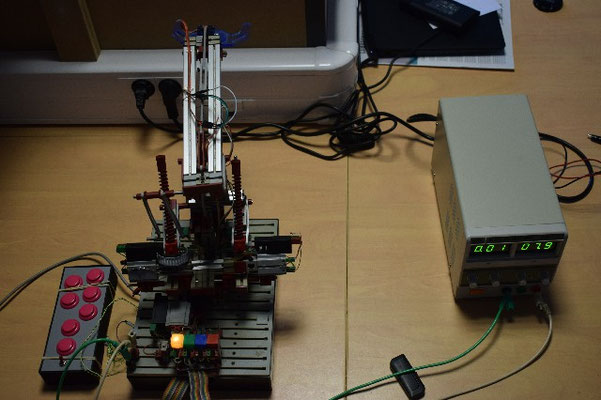
Le boitier de commande
Deux fonctions
> Une fonction apprentissage du mouvement par lequel sera indiqué au robot le mouvement qu’il devra reproduire par la suite, à l’infini.
> Une fonction exécution par laquelle instruction lui sera donnée de reproduire l’ensemble des mouvements initialement programmés.
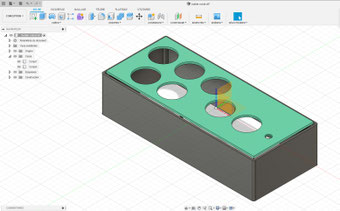
Le boitier a été dessiné sur fusion 360 et imprimé en 3D sur une imprimante Dagoma.
Prendre et déposer une pièce
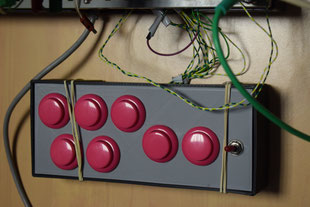
Il est muni d’abord d’un interrupteur qui permet de passer de la fonction apprentissage à exécution, d’un bouton de validation au dessus. Les 3 boutons poussoir verticaux à droite permettent de choisir parmi les 3 moteurs continus. Les boutons de gauche permettent le choix du déplacement.
On indique donc par ces commandes au robot comment chercher la pièce. Après ce choix, avec le second bouton du bas, on enclenche le même type d’opération mais pour décider la dépose de la pièce.
On passe ensuite à l'exécution.
Le dire en images
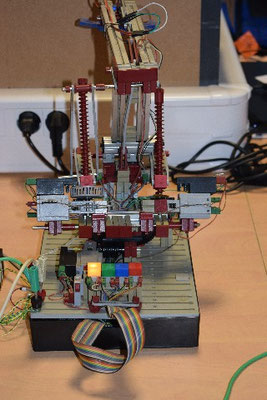
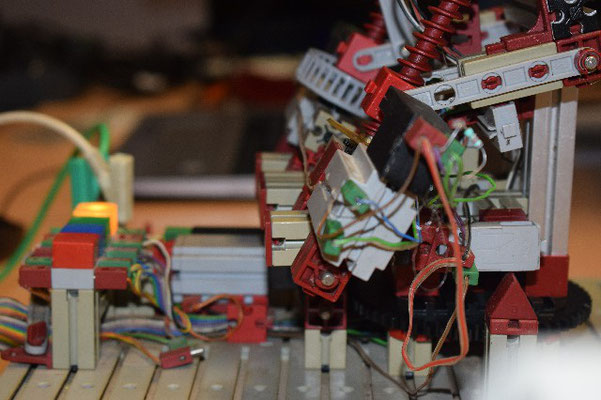
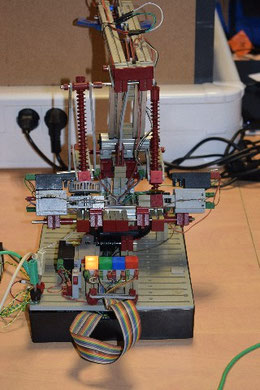
Les détails du robot